簡単・電子工作!ラズベリーパイできること。初心者向け電子回路の使い道。
第9章ラズベリーパイでセンサーを作ろう
次は、様々なセンサーを使ってみましょう。
センサーを作る部品を準備しましょう
ブレッドボード上に配置していますが、(長さは30センチくらいまでの)より線の電線をセンサーの足にはんだ付けして、離れたところで試すことをお勧めします。
![]() 焦電型赤外線(人感)センサー SB412A
焦電型赤外線(人感)センサー SB412A
(小さなボリュームがついています。一度反応したあとの時間の長さが変えられます。好みの長さを試して見つけてください。)
![]() ホールIC SK8552G SIP-3
ホールIC SK8552G SIP-3
![]() フォトリフレクタ(反射タイプ) LBR-127HLD
フォトリフレクタ(反射タイプ) LBR-127HLD
![]() 1/4W抵抗 1kΩ 3 写真で3つ並べています。(330Ωにしています。)
1/4W抵抗 1kΩ 3 写真で3つ並べています。(330Ωにしています。)
![]() 1/4W抵抗 10kΩ
1/4W抵抗 10kΩ
![]() 単芯電線 色は写真と同じもの ちょうどよい長さとしましょう
単芯電線 色は写真と同じもの ちょうどよい長さとしましょう
![]() ブレッドボードジャンパーワイヤー・オスオス 長1本
ブレッドボードジャンパーワイヤー・オスオス 長1本
![]() ブレッドボードジャンパーワイヤー・オスオス 短1本
ブレッドボードジャンパーワイヤー・オスオス 短1本
抵抗の所の穴と青いライン(電池のマイナス)の穴に差し込みます。
(目に見えませんが、これで赤外線が出ますので、電池が不用意に減らないように、センサーを使わないときは外します)
部品を差し込もう
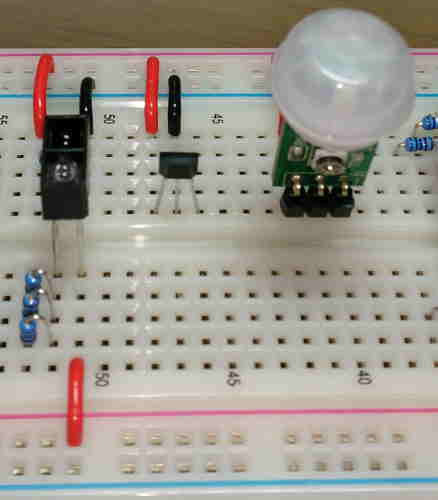
写真のようにブレッドボードにそれぞれの部品を差し込みます。
前から見た写真です↓
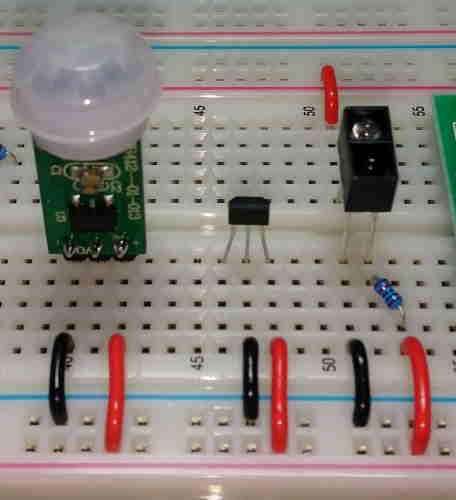
後ろから見た写真です↓
上から見た写真です↓
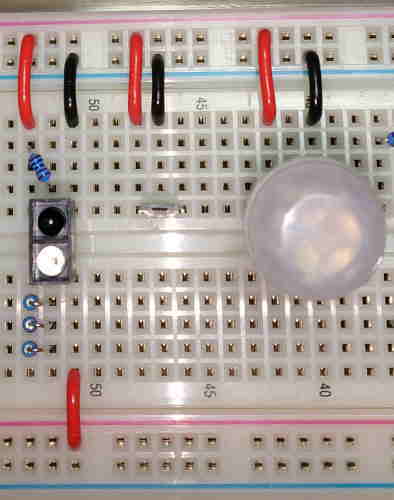
ラズパイにつなぐためのブレッドボードジャンパーワイヤー・オスオスを差し込みます。



ラズパイとつなぐ端子番号は、黄色が26です。
どれか一つのセンサーにつないでから、プログラムを動かします。
プログラミング
プログラムを入力します。 「sensaa.py」とします。
プログラムは、簡単なので、働きはもう分かりますね。
プログラムを動かしてみましょう。 センサーが反応すると、とあるLEDが点灯します。
■焦電センサー
焦電センサーは、熱のあるものがある範囲で動くと反応します。
手を近づけてみましょう。
どうすれば反応するか、逆にどうすれば反応しないか、色々試しましょう。
ペットがセンサーの前を通ると検出してラズベリーパイのカメラで写真をとることにも使えます。
■ホールセンサー
ホールセンサーは、磁気が近づくと反応します。
磁石を近づけてみましょう。
扉や窓に磁石をつけておいて、開閉を検出することにも使えます。
■フォトリフレクタ
フォトリフレクタは、センサーの上部にものが来ると(LEDが消える)反応します。
どのくらい近づくと反応するか試しましょう。
おもちゃの車がセンサーの上を通り過ぎたのを検出することにも使えます。
これらのセンサーの使い道は、自分で考えるとより楽しいと思います。
ロボットには、このような実にたくさんの種類のセンサーが使われています。 モーターとセンサー、ロボットの入り口の電子工作が学べましたね。
